REPORT ON SPACE ROBOTICS Justin Thompson, Astronomy, March 29, 2001 INTRODUCTION Space robotics is a relatively new field of science. It derived from past robots that were used for other practical uses, such as assembly lines and medical research. When the space program came about, and NASA was formed, space robots went into their full form.
ROBOT TECHNOLOGY TODAY The space robotic technology of today is developed and designed by many companies and organizations. Some of the more well known, and noted are NASA, JPL, ETL, and ARL.
The overall objective of many of these programs is to advance the state of the art technology used in space and planetary rovers. The expected benefits are to enable increased rover productivity and scientific knowledge, without risking the rover's safety. A concept that many want to incorporate into rovers in the near future is "contingent command sequence"ÃÂ into rover flight operations.
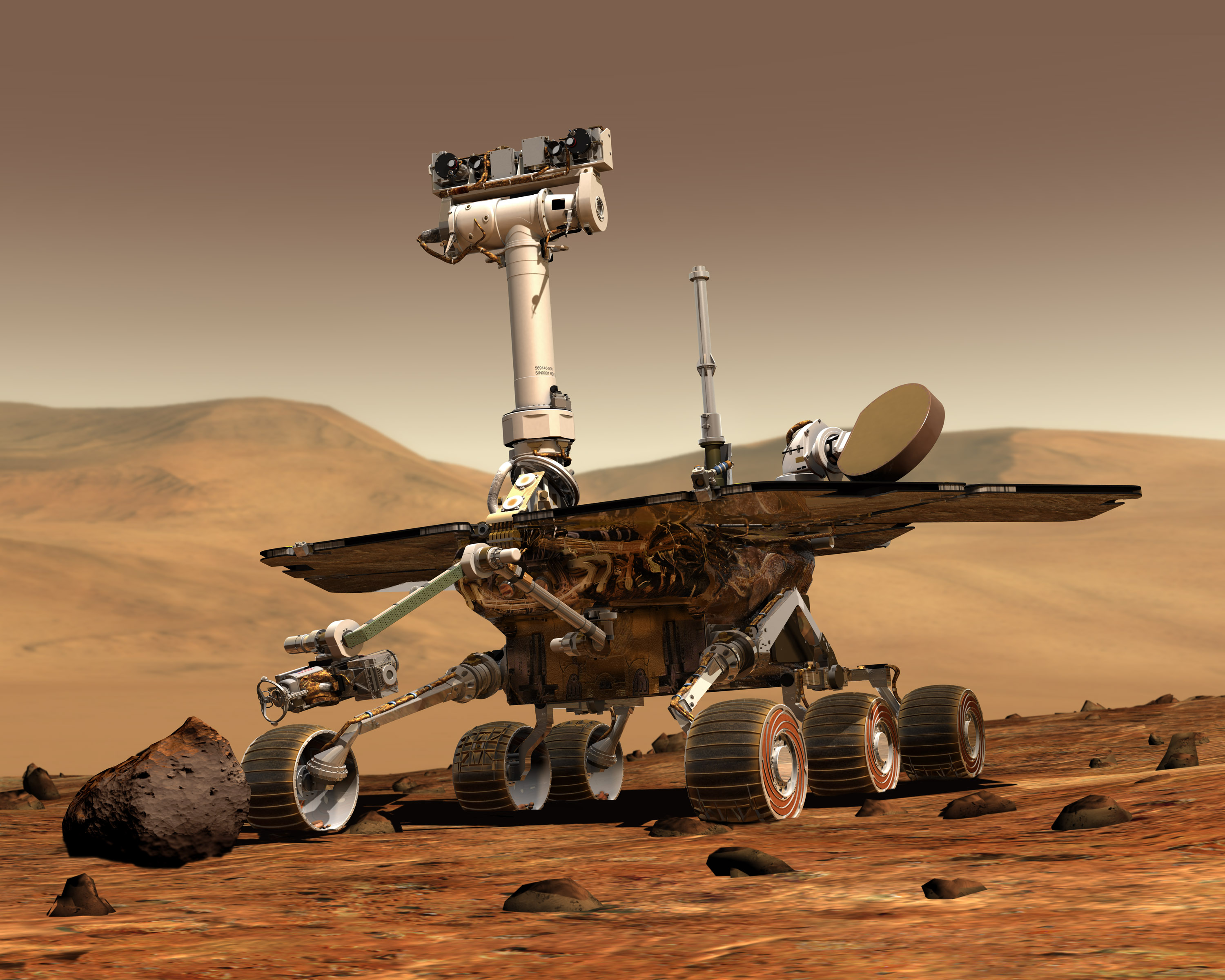 English: Artist's rendering of a Mars Exploration ...
English: Artist's rendering of a Mars Exploration ... Two generations of Rover: Mars Exploration Rover v...
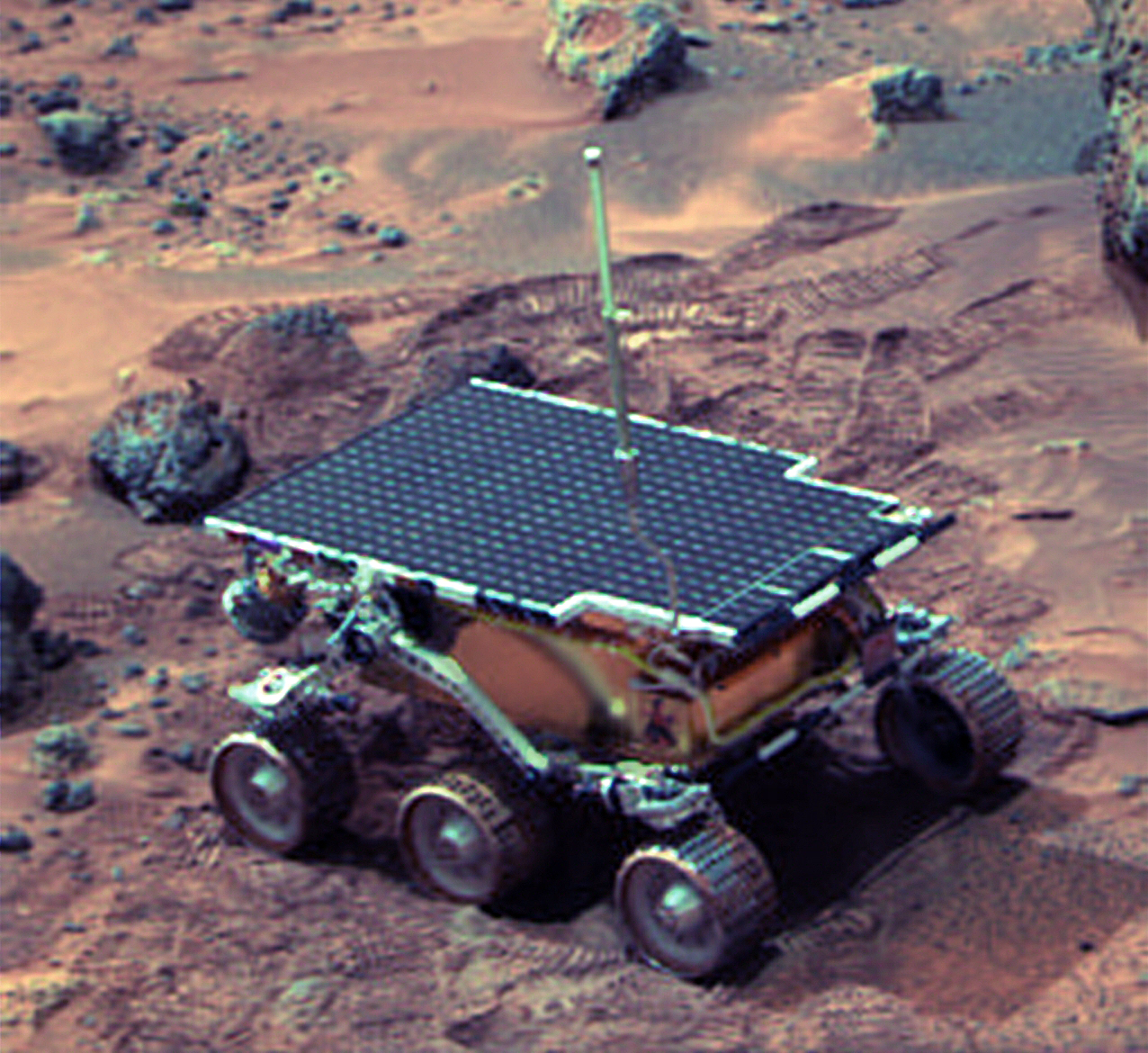
Two generations of Rover: Mars Exploration Rover v... Sojourner takes its Alpha Proton X-ray Spectromete...
Sojourner takes its Alpha Proton X-ray Spectromete...This will by far advance rovers by great standards compared to what they are today, they would basically be able to think for themselves in almost any given situation.
Other new discoveries and innovations in robotics are things like "ARH,"ÃÂ Advance Robotic Hand system. These systems are capable of performing tasks that in the past only humans could do. The reason is that, someone that can be safely located away from the area and can control the ARH using cameras and remote sensors. Stanford University contributes a lot to space robotics. The Aerospace Robotics Laboratory, "ARL"ÃÂ has a state of the art research program in free-flying space robotics. The ARL has developed such technologies that can do great tasks, in a free floating, zero-drag environment. The Robots are capable of, object acquisition and manipulation, and docking of massive objects. The Robots are currently being tested and designed to work in a more unstructured environment. The research at ARL is focused on developing the capabilities of individual robots performing complex extended tasks, and work as teams to perform tasks that would be impossible for a single robot. Sensory, control and cooperative behavior are all a great deal of importance to space robotics.
"Super-Long Distance Space Telerobotics,"ÃÂ is something that both Japan and the U.S. are experimenting with. Super-Long Distance Space Telerobotics is being able to communicate with and operate robots in other countries or in outer space, using the Internet and ISDN. The U.S. and Japan, although working together have different opinions about the future of robotics. "Technologies of intelligent monitoring, object handling knowledge and man-robot cooperative control are emphasized by the Japanese. While technologies of distributed space telerobtics are emphasized by the U.S."ÃÂ (http://www.etl.gov.jpl/) Other proposed, and experimental robot designs have been things like "Smart Cranes."ÃÂ These cranes would have "smart end effectors,"ÃÂ on them, these would allow for a more dexterous crane that could perform smoother and manipulative tasks on command modules or space centers in outer space.
MISSION TO MARS The first mars mission that sent a rover was in 1997. It was Mars Pathfinder that carried the rover Sojourner to the Martian surface. However, in 2003 we are going back with two new rovers that are state of the art. These rovers will carry far more scientific instruments than their predecessor Sojourner. The new rovers will carry panoramic cameras, miniature thermal emission spectrometers, Mossbaurer spectrometers, Alpha Proton X-ray spectrometers, and microscopic imagers. The new rovers will also be able to travel up to ten times as far in one Martian day than Sojourner could, and execute a much more complex robotic mission.
Rovers do have a disadvantage to aerial vehicles like balloons and airplanes. Aerial vehicles can take far more and greater detailed images.
The 2003 Mars mission will last until late May of 2004, but depending on the wellness of the vehicles it could continue longer.
FAMOUS ROBOTS The best-known robot is Sojourner, mainly because it was the first and currently the only rover to travel the Martian surface. Sojourner was launched from Earth December 4, 1996, and landed on Mars July 4, 1997. Sojourner had a weight of about 23 pounds. It carried an Alpha Proton X-ray spectrometer, and three cameras. While on Mars Sojourner out lived its projected expectancy by 12 times. From the time it landed to till its final data transmission on September 27, 1997, the pathfinder returned 2.3 billion bits of information, 17,050 images, 550 that came from Sojourner. It also returned 15 chemical analyses of rocks and soil and data on winds and other weather factors.
Another famous robot, that was before Sojourner's time was NASA's Galileo. Galileo was an un-piloted space probe that traveled to Jupiter in 1996 and performed tasks such as determining he chemical content of the Jovian Atmosphere.
FUTURE ROVERS In the future to be able to explore planets further, rovers will have to be able to go further and move faster.
One idea that is being used for rovers of the future is inflatable rovers. These rovers would use very large inflatable wheels to climb over rocks, instead of going around them, this would allow for further and faster travel. It may also be possible for future rovers to have shoulders that they can move to duck under objects, and radar to detect the presence of water and other resources.
The future rovers are also going to be smarter. They will be able to adjust to terrain. Eventually there will be teams of robots that will work together to form the groundwork, and the basis for human visits.
 Sojourner rover on Mars on sol 22
Sojourner rover on Mars on sol 22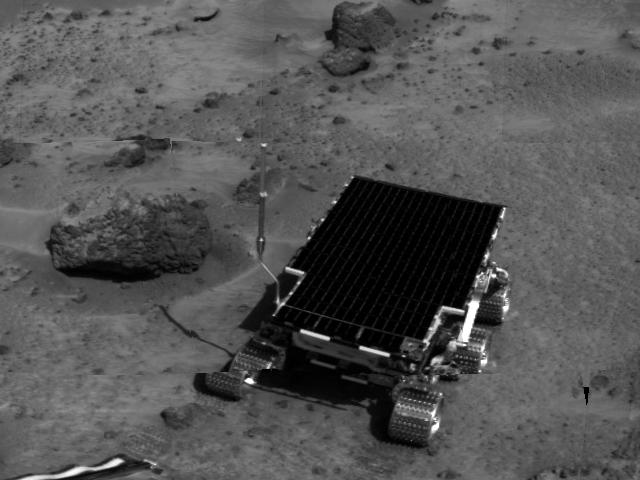 English: Sojourner Rover and rock "Barnacle Bill" ...
English: Sojourner Rover and rock "Barnacle Bill" ... Mars rover Sojourner in cruise configuration
Mars rover Sojourner in cruise configuration